距離測量の器械誤差とは?測量士補で押さえる考え方
本ページはプロモーション(アフィリエイト広告)を含みます。

ソクタ
「器械誤差」は測り直しても消えないの?
この記事の要点
距離測量の器械誤差とは何かを解説します。測量機器の製作・調整から生じる系統誤差と偶然誤差の違い、試験で押さえる誤差の考え方を整理します。
測量機器には製作精度の限界から生じる「器械誤差」が必ず含まれます。
系統誤差と偶然誤差の違いを含め、誤差の考え方をここで整理します。

器械誤差とは、測量機器の製作精度の限界や調整の不完全さから生じる誤差のことです。
距離測量で使う光波測距儀(EDM)やトータルステーションにも器械固有の誤差が含まれます。
この器械誤差は、同じ条件で繰り返し観測しても同じ方向にずれる「系統誤差」の性質を持つことが多く、補正定数(器械定数)を用いて補正できます。
一言でいうと、光波測距儀やトータルステーションが持つ「クセ」による誤差の話です。製作や調整の不完全さから生じ、同じ方向に偏る系統誤差が中心で、器械定数などで補正できるのが特徴です。読み取りや環境で生じる偶然誤差とは性質が違います。
この単元を効率よく仕上げたい人は、あわせて測量士補のテキスト・過去問集の選び方も見ておくと学習計画を立てやすくなります。
独学での理解や計算に不安があるなら、通信講座という選択肢もあります。合格率の実績で選ぶ人が多いアガルート測量士補講座の評判・合格率も確認してみてください。
器械誤差の意味と種類
器械誤差には、測距の基準となる周波数のずれや、反射プリズムの中心と測定点のずれ(プリズム定数誤差)などが含まれます。
これらは検定や調整によって把握・補正できます。
光波測距儀の場合、器械定数(加定数・乗定数)として誤差を補正します。
乗定数誤差は距離に比例して大きくなる誤差で、加定数誤差は距離によらず一定量生じる誤差です。
具体的な許容値については最新の作業規程の準則で確認してください。
系統誤差と偶然誤差の違い
測量の誤差は大きく系統誤差(定誤差)と偶然誤差(不定誤差)に分けられます。
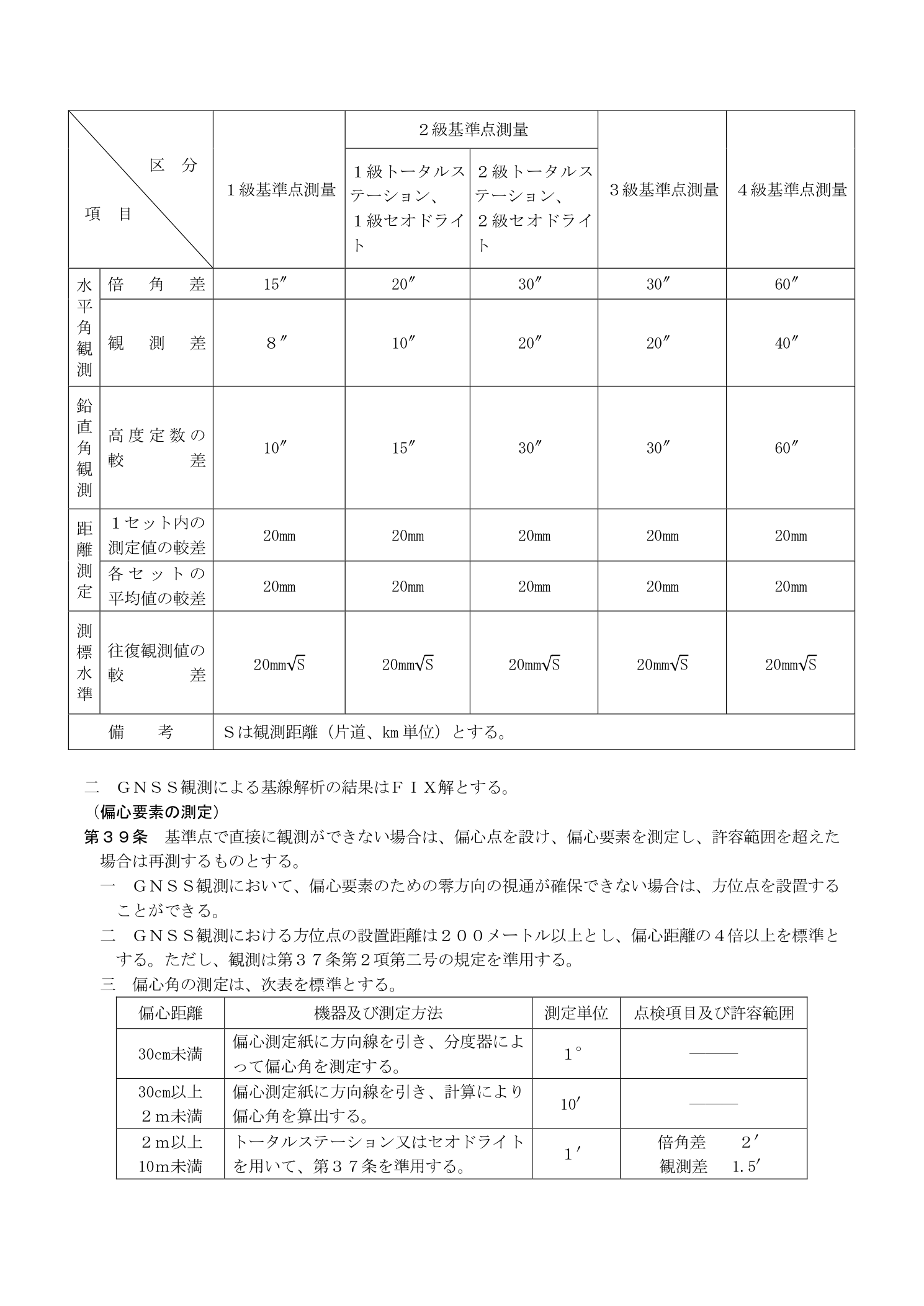
作業規程の準則(下図)では、観測精度の区分が定められています。
器械誤差は主に系統誤差に分類されます。
系統誤差と偶然誤差の比較
2種類の誤差を比較して整理します。
| 項目 | 系統誤差(定誤差) | 偶然誤差(不定誤差) |
|---|---|---|
| 特徴 | 一定の傾向・方向がある | 不規則・ランダム |
| 補正 | 補正定数で補正可能 | 繰り返し観測で影響を小さくする |
| 試験でのポイント | 器械誤差・温度誤差など | 測定の読み取りばらつきなど |
器械誤差は系統誤差に分類され、補正定数(器械定数)を用いて補正します。偶然誤差は繰り返し観測の平均をとることで影響を小さくします。
試験で問われやすいポイント
令和3年第7問(正誤:TS水平角観測の誤差)では、「水平目盛盤が水平軸と平行でないために生じる誤差」「視準線がTS水平軸から外れているために生じる誤差」の2つが誤りとして出題されました(正答:選択肢5)。水平角の誤差原因(水平軸・鉛直軸・視準軸の不一致)はセットで整理しておきましょう。
測量の誤差は系統誤差(一定方向のずれ、補正定数で補正可能)と偶然誤差(ランダムなずれ、繰り返し観測で影響を低減)に分けられます。器械誤差は系統誤差に分類される点を押さえておきましょう。
混同しやすい用語
器械誤差 ↔ 観測誤差
器械誤差は機器の特性に起因する誤差。観測誤差は観測者の読み取りミスなど人為的要因も含む広い概念。
偶然誤差 ↔ 系統誤差
偶然誤差はランダムで繰り返し観測の平均で小さくなる。系統誤差は一定傾向があり平均では消えず、補正が必要。
一問一答
問題:器械誤差は偶然誤差の一種であり、繰り返し観測の平均をとることで取り除くことができる。
〇か×か。
答え:×
器械誤差は系統誤差の一種です。繰り返し観測の平均では消えず、補正定数を用いて補正します。
問題:系統誤差(定誤差)は、一定の傾向を持つ誤差であり、補正定数などによって補正できる。
〇か×か。
答え:〇
系統誤差は一定の傾向があるため、その傾向を把握して補正することが可能です。
問題:光波測距儀の乗定数誤差は、測定距離が長くなるほど誤差量が大きくなる性質がある。
〇か×か。
答え:〇
乗定数誤差は距離に比例して生じる誤差です。距離が長いほど誤差量が増えます。
まとめ
今回は距離測量の器械誤差について説明しました。
器械誤差は系統誤差の一種で、補正定数を使って補正します。
偶然誤差とは性質が異なり、繰り返し観測の平均では取り除けません。
この区分を正確に理解しておきましょう。
誤差補正の具体的な手法についてはこちらの記事も参考にしてください。
用語の意味を押さえたら、過去問で実際の問われ方に慣れるのが得点への近道です。教材選びに迷ったら測量士補のテキスト・過去問集の選び方を参考にしてください。
短期間で確実に合格したい人は、通信講座も検討の価値があります。アガルート測量士補講座の評判・合格率で、費用や合格特典を確認できます。
参考法令・規格
- 測量法(昭和24年法律第188号)
- 公共測量作業規程の準則(国土交通省)第2章 基準点測量
※ この記事の確認日:2026年5月

▼測地測量の記事一覧▼
▼カテゴリ一覧▼
スキマ時間に
おすすめ書籍

測量士補対策の定番(テキストで基礎固め+過去問で腕試し)。価格・在庫は各ページで確認
試験での問われ方|ソクタの一言
「偶然誤差は繰り返し観測の平均をとれば消える」という表現は試験で出やすいです。偶然誤差は完全に消えるわけではなく、繰り返し観測で影響を「小さくできる」が正確です。系統誤差は補正定数で取り除く、この対比を正確に覚えておきましょう。